My Ph.D. on Task Allocation and Collaborative Localisation in Multi-Robot Systems was completed at the University of Adelaide in 2019.
In short, it introduced new methods in the overlap of task allocation and collaborative localisation. Task allocation is the decision making of how to allocate agents to multiple jobs, and collaborative localisation is a sensor fusion technique to allow multiple agents to improve their understanding of their location and orientation.
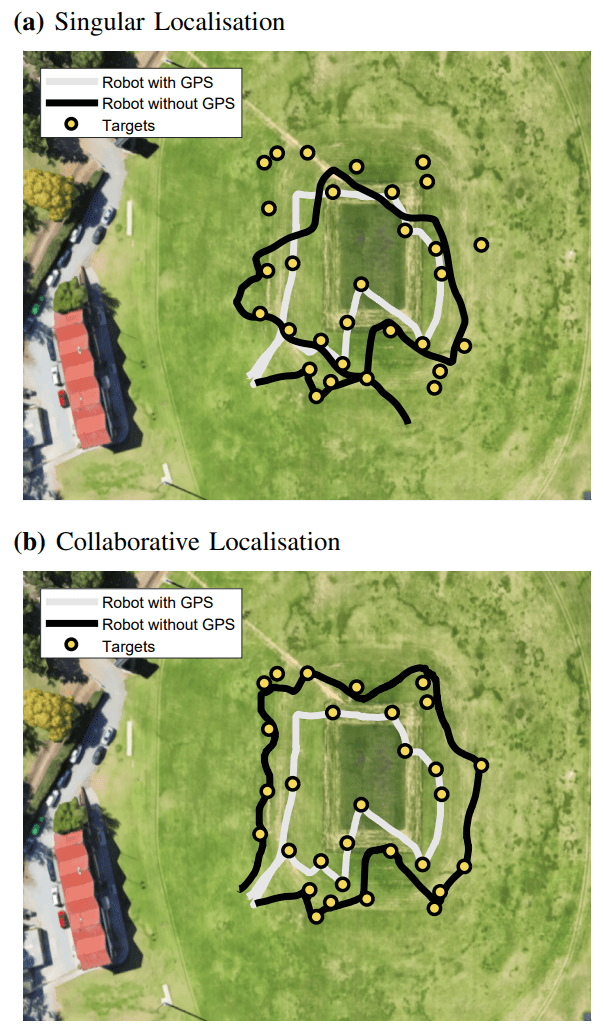
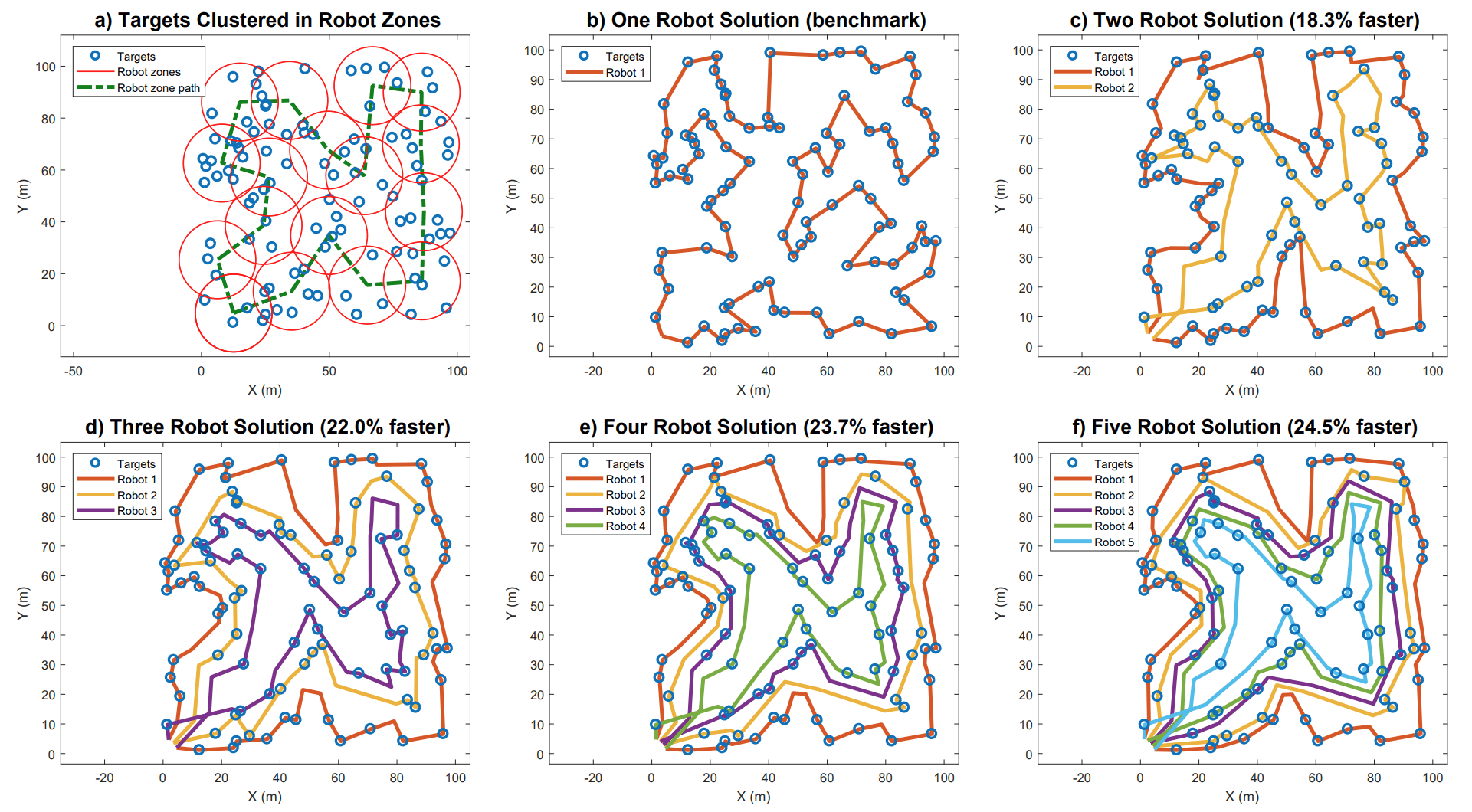
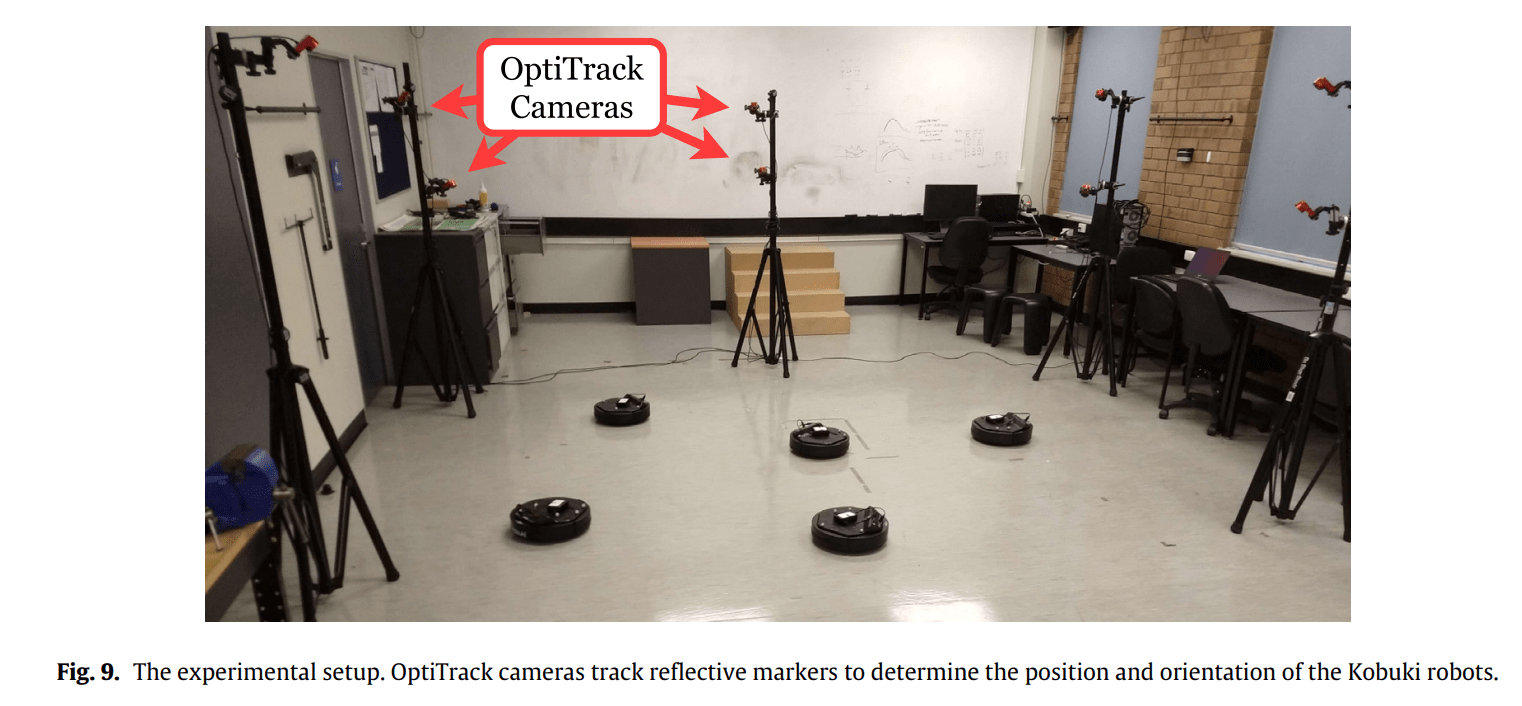
I developed a highly scalable path planning algorithm that ensures agents stay near one another, and applied it to autonomous vehicles with differing sensing capabilities:

I assessed the impact of sensor noise on collaborative localisation.
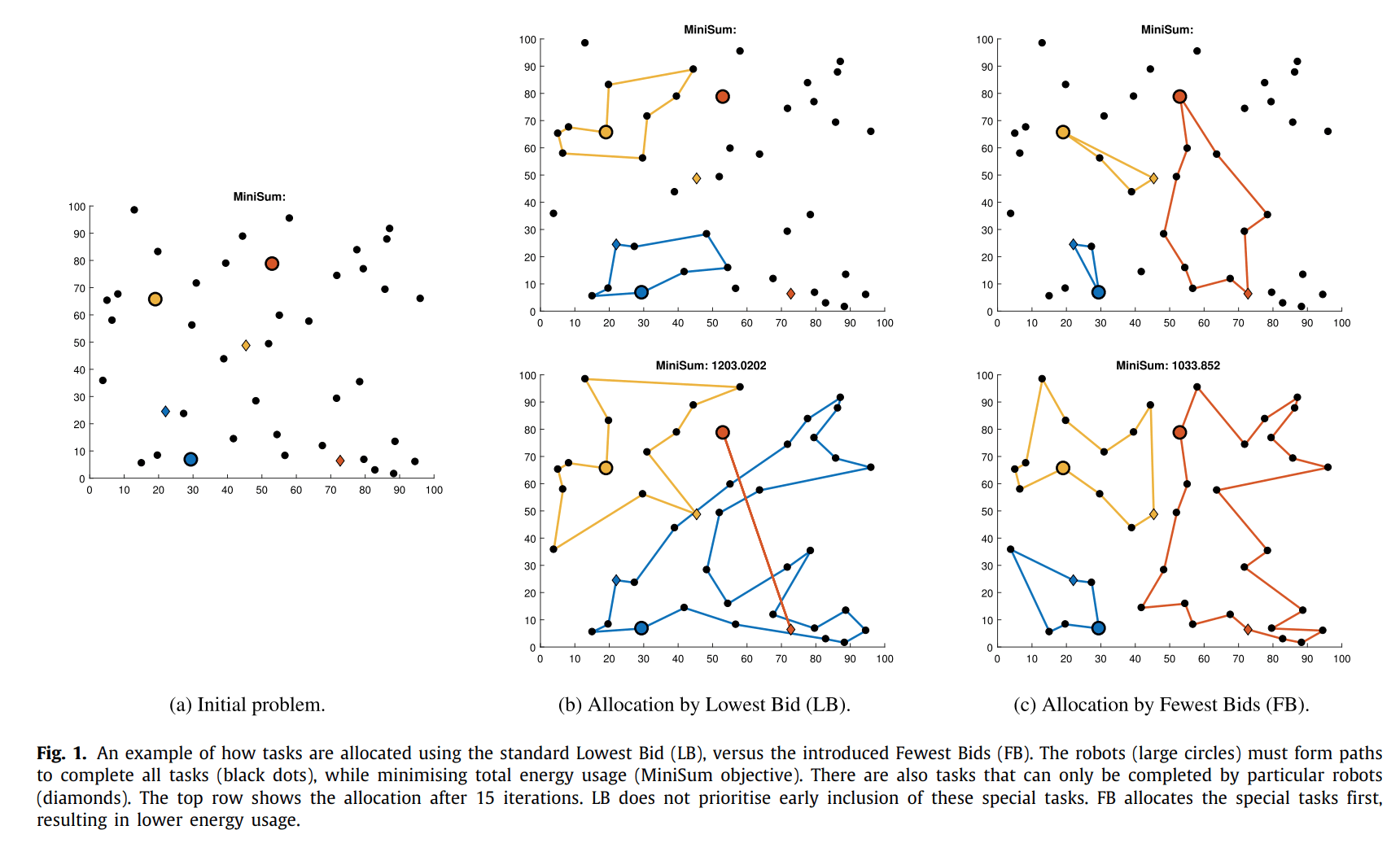
I introduced improvements to auction-based allocation when the agents have different capabilities.